Fotogrammetrie speelt een cruciale rol in het vastleggen en verwerken van ruimtelijke informatie. De technologie stelt ons in staat om op basis van foto’s en beeldmateriaal uiterst nauwkeurige 3D-modellen en coördinaten te berekenen. Dit wordt mogelijk gemaakt door wiskundige modellen en berekeningen. In dit artikel leggen we uit hoe coördinaten uit twee of meer foto's kunnen worden bepaald door in de foto's overeenkomstige punten aan te wijzen.
Uit de overlap van twee of meer foto's kunnen driedimensionale coördinaten worden berekend. Dat vereist dat de werking van de camera eerst modelleren als een projectieve transformatie. In het artikel Fotogrammetrie: Het cameramodel leggen we uit op welke manier het cameramodel gedefinieerd is. Hierin wordt uitgelegd dat we gebruik maken van een centrale projectie. Daaruit volgen de collineariteitsvergelijkingen die de basis vormen voor alle berekeningen die we in de foto's uitvoeren.
Voorwaartse insnijding
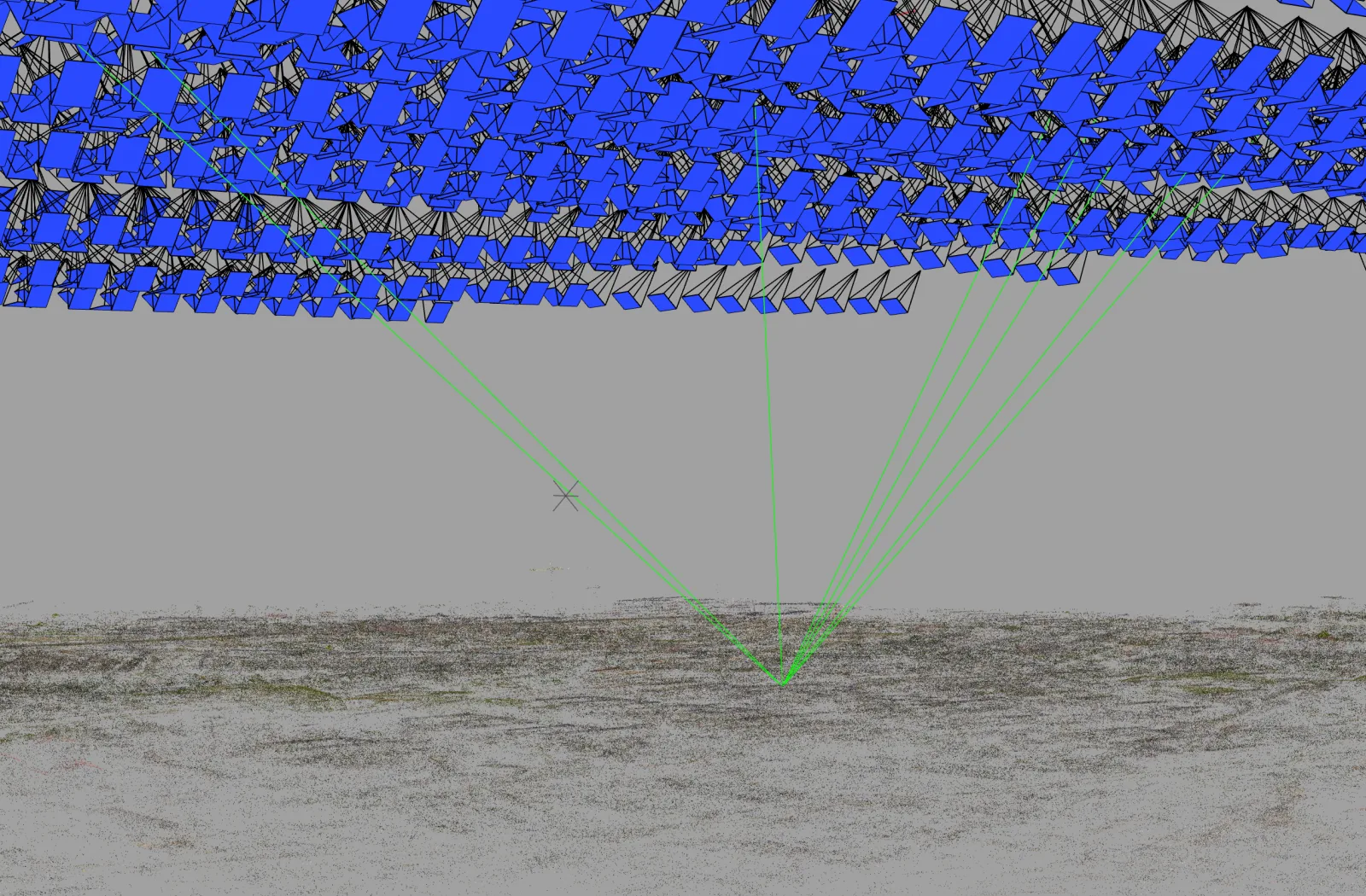
De basis van de coördinaatbepaling wordt gevormd door de methodiek van de voorwaartse insnijding. Een principe dat ook landmeetkundige toepassingen kent, bijvoorbeeld bij metingen met een theodoliet. Gegeven de centrale projectie weten we dat een punt dat we op een foto herkennen in het terrein op één lijn moet liggen met het projectiecentrum en het punt op de foto. Waar het punt op de lijn ligt is echter onbekend. Een manier om de locatie langs de lijn te bepalen is door hetzelfde punt in een andere foto op te zoeken. Het snijpunt van de twee lijnen definieert in dat geval de driedimensionale locatie van het terreinpunt (Figuur 1). Indien het punt ook op andere foto’s te zien is, kan de betrouwbaarheid van de coördinaatbepaling verder verhoogd.
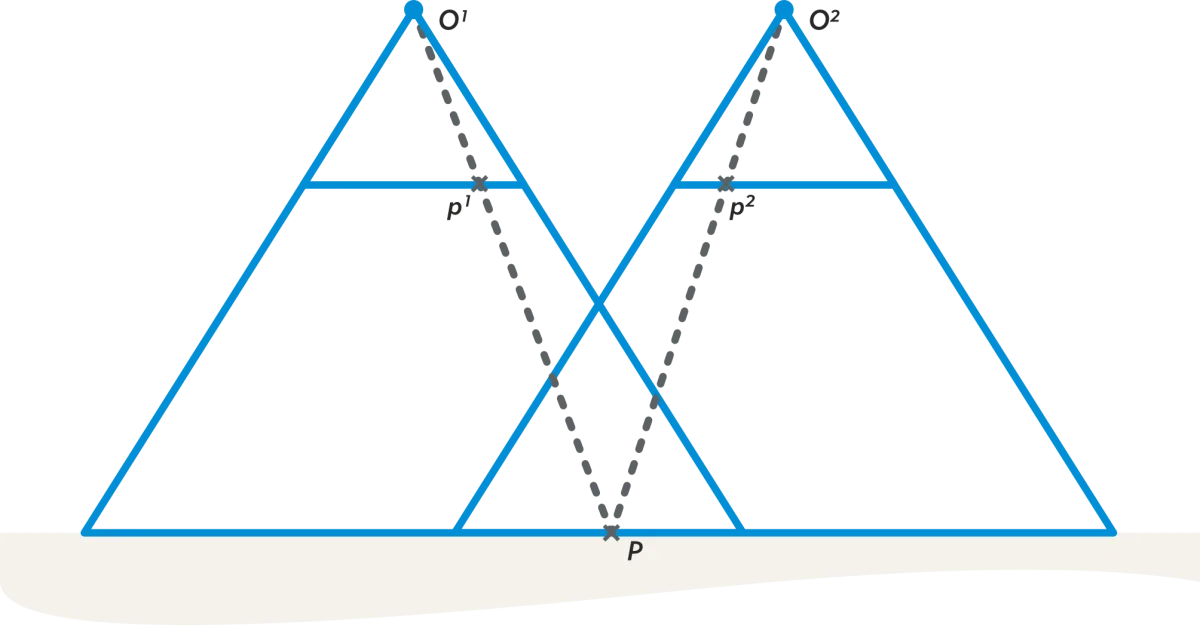
Figuur 1 – De coördinaten van een terreinpunt volgt uit de insnijding van de lijnen die door het projectiecentrum van de foto lopen.
Het bepalen van de voorwaartse insnijding vanuit minimaal twee foto’s vereist dat de stand en positie van de foto bekend zijn. De stand en positie van de foto worden beschreven door 𝑋𝑂, 𝑌𝑂 en 𝑍𝑂 voor de locatie van het projectiecentrum en de rotatiematrix 𝑅 voor de rotatie van het fotostelsel. Gezamenlijk worden deze parameters de uitwendige oriëntering genoemd.
Dat een minimum van twee foto’s met bekende uitwendige oriëntering noodzakelijk is om een coördinaat te bepalen, blijkt ook uit de collineariteitsvergelijkingen. Bij een meting in één foto zijn er twee waarnemingen (de 𝑥-coordinaat en de 𝑦-coördinaat), terwijl er drie onbekenden zijn voor de driedimensionale terreincoördinaten van het punt. Door toevoeging van een tweede foto, ontstaan er vier waarnemingen ten opzichte van de drie onbekenden. De overtalligheid is het gevolg van het feit dat de twee lijnen elkaar niet noodzakelijk in één punt snijden. In werkelijkheid zullen de twee lijnen elkaar vaak net niet snijden en zijn we op zoek naar de locatie waar de afstand tussen de twee lijnen het kortst is. Een optimaliseringsvraagstuk dus dat met een kleinste kwadratenvereffening kan worden opgelost.
Foto's met overlap
En zodoende worden luchtfoto's dus met overlap gemaakt. Tijdens de vluchtplanning wordt de camera zodanig ingesteld dat er altijd voldoende overlap tussen foto's is, zodat overal driedimensionale coördinaten kunnen worden berekend. Bij luchtfotogrammetrie wordt doorgaans een overlap van 60% gekozen voor standaard stereokartering (figuur 2). Als ook puntenwolken berekend moeten worden, wordt meestal een overlap van 80% gekozen.
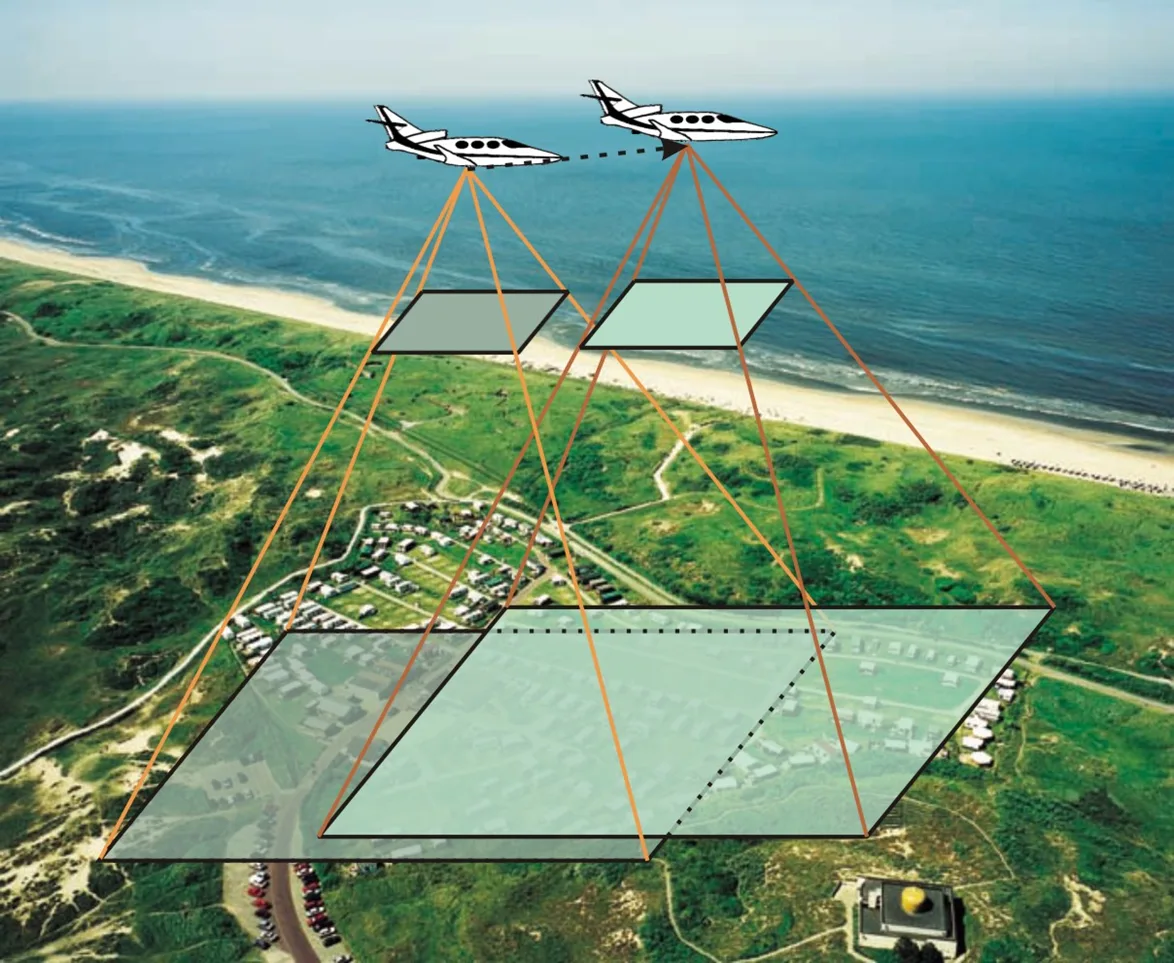
Figuur 2 - Een overlap van 60% bij luchtfotogrammetrie.
Waar zijn de foto's genomen?
De hier beschreven werkwijze voor het berekenen van coördinaten veronderstelt dat bekend is wat de positie van de foto in het terreinstelsel is. Ook wordt verondersteld dat we weten wat de stand van de camera was op het moment van opname. Met andere woorden, welke rotaties op de foto van toepassing zijn. Met behulp van GNSS en traagheidsnavigatie kunnen de positie en stand gemeten worden. In de praktijk is dit echter niet voldoende nauwkeurig. Een betere manier om de positie en stand te bepalen is met behulp van triangulatie en een bundelblokvereffening. Hoe dit werkt staat beschreven in deel 3: Triangulatie en bundelblokvereffening.