Fotogrammetrie speelt een cruciale rol in het vastleggen en verwerken van ruimtelijke informatie. De technologie stelt ons in staat om op basis van foto’s en beeldmateriaal uiterst nauwkeurige 3D-modellen en coördinaten te berekenen. Dit wordt mogelijk gemaakt door wiskundige modellen en berekeningen. In dit artikel leggen we uit hoe we de stand en de positie van foto's die in een vliegtuig of drone zijn gemaakt kunnen berekenen.
Uit de overlap van twee of meer foto's kunnen driedimensionale coördinaten worden berekend. In het artikel Fotogrammetrie: Coördinaatbepaling hebben we uitgelegd hoe coördinaten uit twee foto's kunnen worden berekend. Om dat mogelijk te maken, moet wel de positie van beide foto's bekend zijn. Ook moeten we weten wat de stand van beide foto's was. We noemen dat de uitwendige oriëntering. De meest betrouwbare manier om een uitwendige oriëntering te bepalen is met een triangulatie en bundelblokvereffening.
Verbindingspunten
In de praktijk is de uitwendige oriëntering van een foto niet automatisch bekend. Het is mogelijk de uitwendige oriëntering te meten tijdens de opname, bijvoorbeeld door middel van GNSS- en INS-waarnemingen. Het is echter nauwkeuriger om de uitwendige oriëntering te berekenen.
Uit de collineariteitsvergelijkingen volgt dat driedimensionale coördinaten bepaald kunnen worden als een punt in minimaal twee foto’s is aangemeten (zie Coördinaatbepaling). Er zijn dan vier waarnemingen voor drie onbekenden. In feite is er sprake van een mini-vereffening om de beste oplossing voor dit vraagstuk te berekenen.
De uitwendige oriëntering per foto zou gezien kunnen worden als een aanvullende set onbekende parameters die tijdens een vereffening opgelost moet worden. Een punt meten in twee foto's is dan niet meer voldoende. Er moeten altijd meer waarnemingen zijn dan onbekenden. Zou het mogelijk zijn de uitwendige oriëntering te bepalen door heel veel extra fotowaarnemingen toe te voegen? Dit blijkt inderdaad mogelijk bij toepassing van het principe van de bundelblokvereffening.
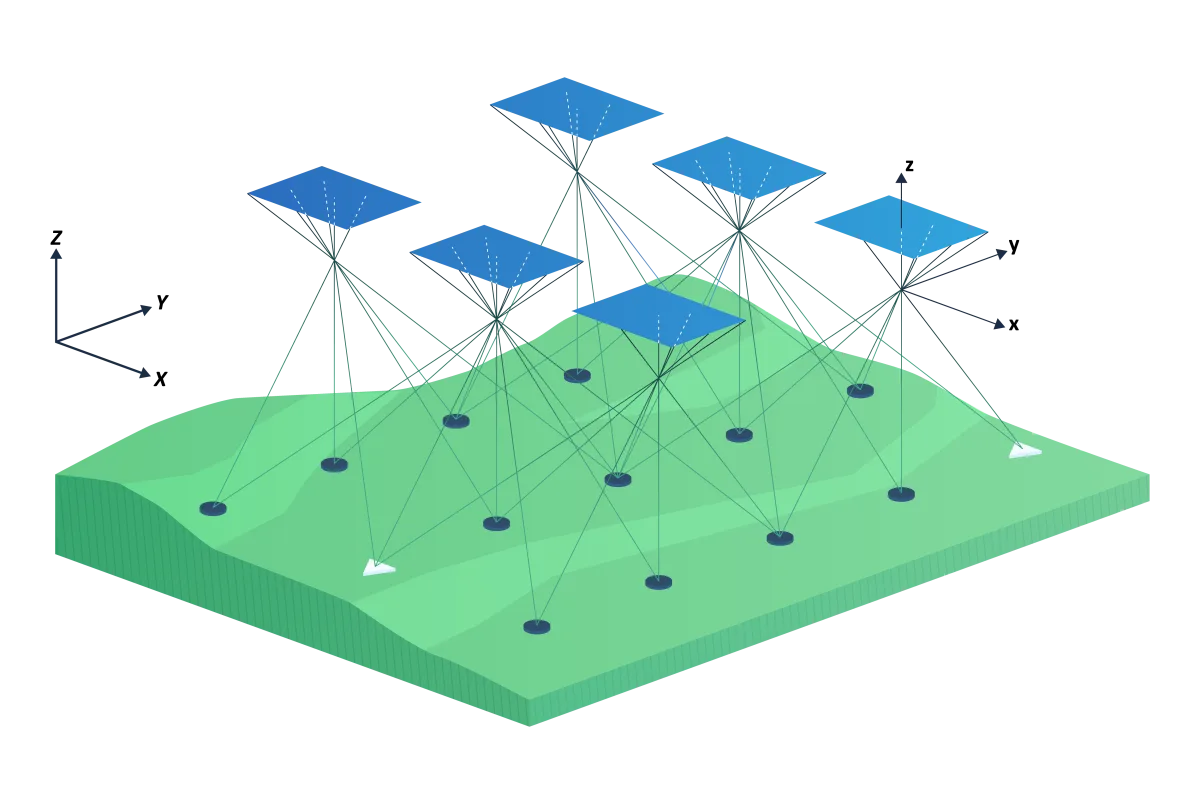
Figuur 1 - Bundelblokvereffening
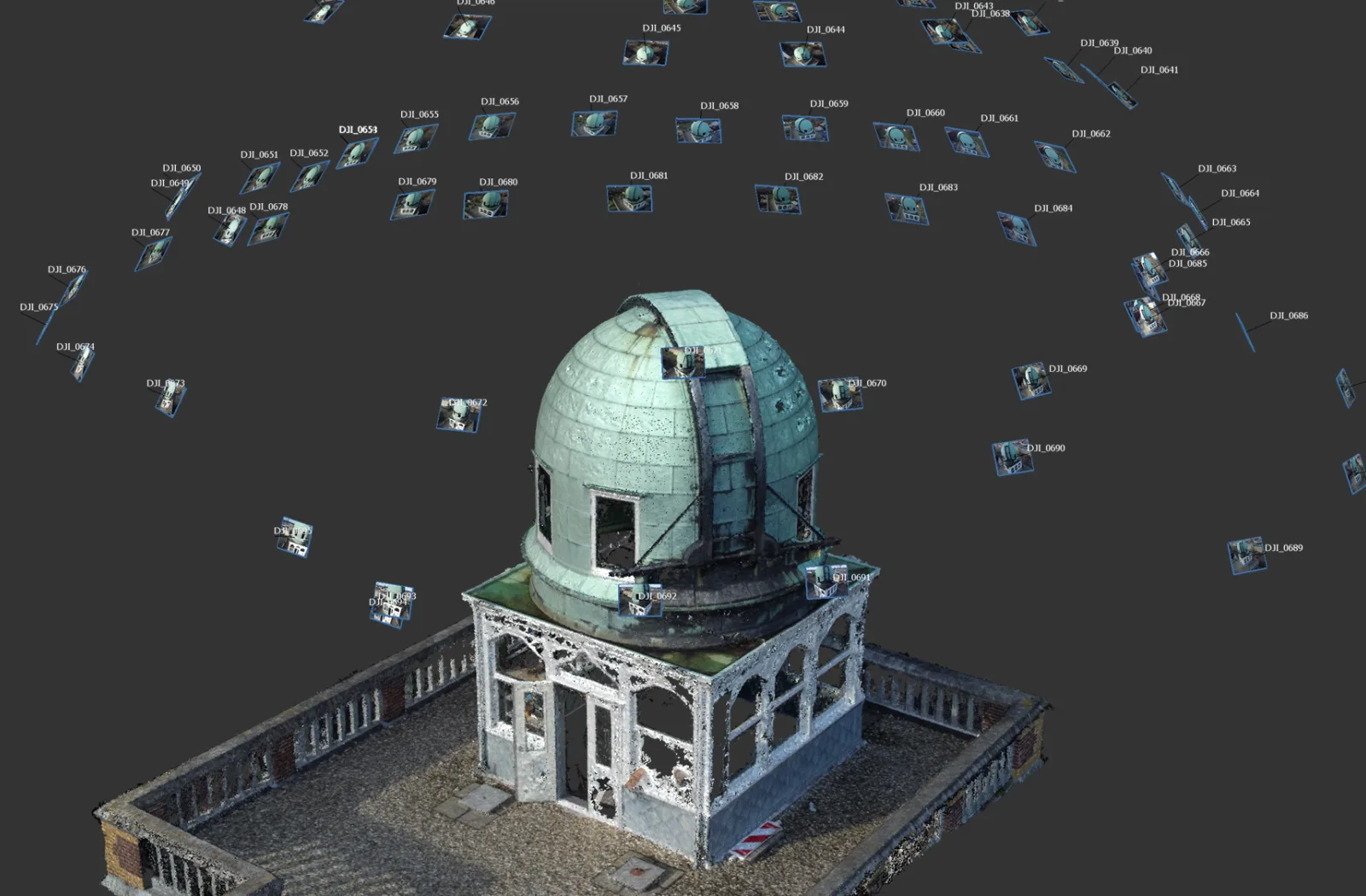
In Figuur 1 is te zien hoe een groot aantal punten is aangemeten in meerdere foto’s. Deze punten worden verbindingspunten genoemd. De verbindingspunten zijn willekeurige punten in het terrein. De betekenis van de punten is niet van belang, zolang de punten maar goed herkenbaar en onbeweeglijk zijn. Verbindingspunten kunnen handmatig worden gemeten. In dat geval zijn verflijnen, stoepranden en andere contrastrijke objecten goede kandidaten. Er zijn echter veel verbindingspunten nodig, dus dit is heel veel werk. Verbindingspunten worden daarom volautomatisch berekend. Hiervoor zijn verschillende algoritmes beschikbaar, waaronder SIFT en LightGlue. Beide algoritmes leveren voor het menselijk oog betekenisloze punten. Voor het algoritme bevatten deze punten echter voldoende contrastkenmerken om in meerdere foto’s terug te kunnen vinden. Figuur 2 toont een voorbeeld van een aantal verbindingspunten tussen twee obliekfoto's uit een drone-opname. Het bepalen en aanmeten van de verbindingspunten wordt de triangulatie genoemd.

Figuur 2 - Een aantal verbindingspunten in twee obliekfoto's uit een drone-opname
Paspunten
Net als iedere andere landmeetkundige meting, dient ook bij fotogrammetrie ingepast te worden op een coördinatenstelsel. Bij een landmeetkundige meting wordt daarbij gebruik gemaakt van een grondslag. Dat is een set punten die herkenbaar zijn in het terrein en waarvan de coördinaten bekend zijn. Ook de fotogrammetrie maakt gebruik van een grondslag bestaande uit een set paspunten.
De paspunten worden tijdens de triangulatie aangemeten in iedere foto waarin ze zichtbaar zijn. Een paspunt lijkt in alle opzichten op een verbindingspunt, met dat verschil dat voor een paspunt de terreincoördinaten bekend zijn. Paspunten worden vaak duidelijk herkenbaar in het terrein aangebracht door middel van een witte punt in een zwarte cirkel (figuur 3). Bij close range en dronetoepassingen worden ook signaleringen toegepast die door de computer automatisch kunnen worden uitgelezen. Voor luchtfotogrammetrie worden ook vaak natuurlijke paspunten toegepast. Dit zijn punten die uit zichzelf goed zichtbaar zijn, zoals verflijnen en putten.
Soms worden in een project ook controlepunten toegepast. Dit zijn punten waarvan de coördinaten bekend zijn, maar die niet als paspunt worden gebruikt. Deze punten bieden een onafhankelijke controle van het bereikte resultaat. Merk op dat spraakverwarring op de loer licht doordat de Nederlandse naam controlepunt veel lijkt op het Engelse woord voor paspunt: Ground Control Point. Dit komt doordat het woord controle in zowel de Engelse als Nederlandse taal twee betekenissen heeft, namelijk “inspecteren” en “beheersen”. In het Nederlands is de betekenis van inspectie gangbaarder.

Figuur 3 - Een gesignaleerd paspunt voor luchtfotogrammetrie.
Functiemodel voor de vereffening
Uit het plaatje in Figuur 1 is ook intuïtief te zien dat er sprake is van een ingewikkeld optimalisatieprobleem. De collineariteitsvoorwaarde blijft van toepassing. Daardoor is het noodzakelijk dat voor iedere fotowaarneming het punt in de foto, het projectiecentrum en het punt in het terrein op één lijn liggen. Bij waarnemingen van een paspunt, moet het terreinpunt bovendien ook de paspuntcoördinaten meekrijgen. Om dit te bewerkstelligen is het draaien en verschuiven van de individuele foto’s de enige bewegingsvrijheid die beschikbaar is. De geoefende geodeet ziet hier direct de noodzaak voor een kleinste kwadratenvereffening.
De bundelblokvereffening maakt gebruik van het A-model voor vereffening op basis van waarnemingsvergelijkingen. Hiervoor wordt de collineariteitsvergelijking gebruikt. De waarnemingen zijn de 𝑥- en 𝑦-coördinaten van de verbindingspunten en paspunten in het fotostelsel per terreinpunt per foto. Dit kunnen in de praktijk, bij grote blokken, miljoenen waarnemingen zijn. Daarnaast worden waarnemingen toegevoegd voor de terreincoördinaten van de paspunten en eventuele GNSS/INS-waarnemingen van de stand- en positie van de camera. De positie en de stand van alle foto's, alsmede de terreincoördinaten van de verbindingspunten, zijn de onbekende die met een vereffening moeten worden geschat. De bundelblokvereffening wordt uitgevoerd volgens de Delftse Methode voor vereffenen en toetsen. Net als bij landmeetkundige metingen, kan dan dus een volledige toetsing op meetfouten én een kwaliteitsbeschrijving worden gerapporteerd.
Vereffening fases
Bij een vereffening volgens de Delftse methode voor vereffenen en toetsen wordt een vereffening vaak in twee fases uitgevoerd:
- Eerste fase vereffening (of vrij netwerkvereffening): hiermee wordt getoetst of er meetfouten in de eigen waarnemingen aanwezig zijn. Deze stap is van groot belang. Verbindingspunten worden automatisch opgespoord met een algoritme zoals Sift of LightGlue, maar dat is niet altijd feilloos. Verkeerd gekoppelde punten kunnen in de eerste fase opgespoord worden door middel van toetsing (doorgaans met de ééndimensionale w-toets) en dan uit de set met waarnemingen verwijderd worden.
- Tweede fase vereffening (of aansluitingsvereffening): in deze stap worden de paspunten en de GNSS/INS-waarnemingen toegevoegd. Nu we getoetst hebben of alle fotowaarnemingen kloppen, kunnen we ervan uitgaan dat nieuwe fouten die zich in deze stap voordoen het gevolg zijn van fouten in onze aansluitpunten. In de tweede fase vereffening worden alle foto's in het gewenste coördinatenstelsel ingepast. Het resultaat van deze vereffening is het eindresultaat van de triangulatie en bundelblokvereffening.
Van vereffening naar eindproduct
Met het bepalen van de uitwendige oriëntering van de foto's, is het mogelijk om driedimensionale geometrie uit de foto's te meten of te berekenen. De foto's kunnen nu direct ingezet worden voor stereokartering. Het is ook mogelijk om op basis van deze informatie andere producten te berekenen, zoals puntenwolken met behulp van dense matching.
Bij toepassingen die hoge kwaliteit vereisen, is het belangrijk om het eindresultaat van de triangulatie en bundelblokvereffening eerst goed te toetsen. Een aspect dat hierbij bijzondere aandacht vereist is de kalibratie van de fotocamera. In deel 4 is beschreven wat er komt kijken bij de kalibratie van een camera voor toepassing in de fotogrammetrie.


