Obtaining accurate X,Y,Z coordinates from laser points requires many measurement facilities such as GNSS, IMU and control points. Several measurement aspects determine the usefulness of a point cloud. This article discusses the main ones.
Point density
The number of points per square meter or cubic meter - point density - is an important quality indicator for most projects. Laser beams are emitted at constant scan angles to obtain an even distribution across the scene. The consequence of the invariability of the scan angles is that the point density decreases with increasing distance from the laser scanner (Figure 1). This decrease is more or less quadratic with distance. In addition, the point density decreases because the strength of the reflection decreases with distance. As a result, the signal strength received by the laser sensor is sometimes too weak to measure an accurate distance or no signal is received at all.
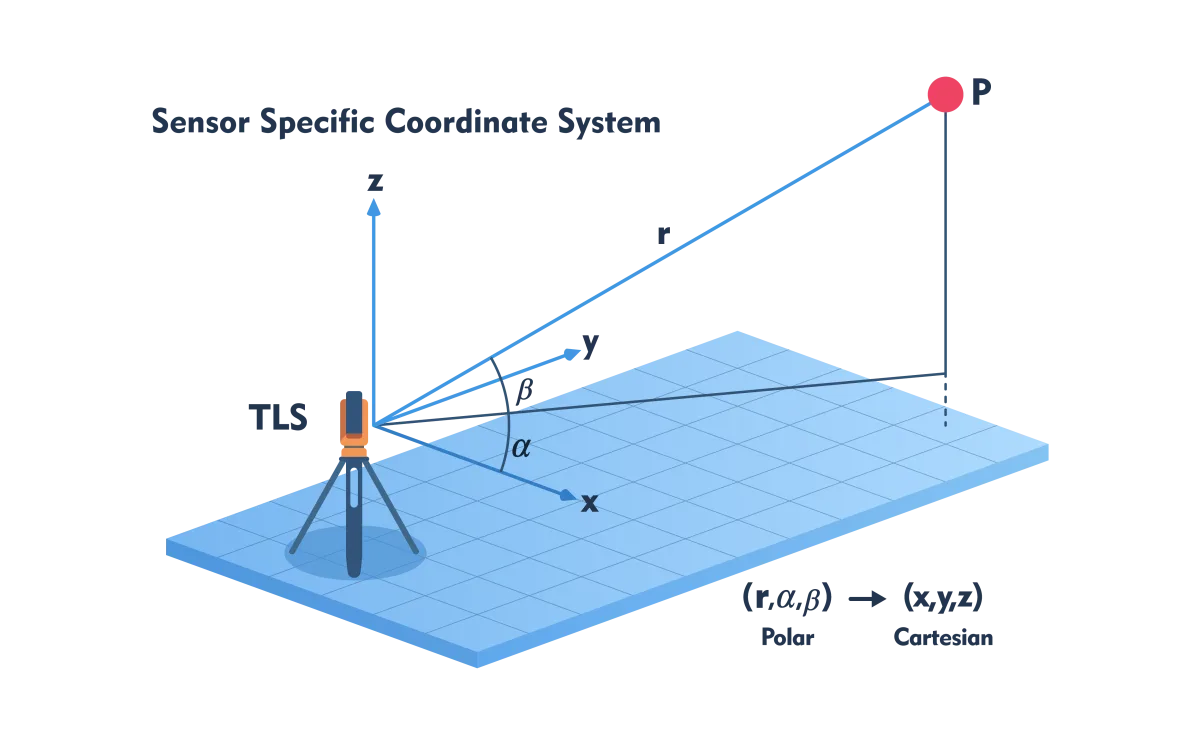
Figure 1 - Point density depends on the distance between laser scanner and object, demonstrated using a Terrestrial Laser Scanner (TLS); angles α and β are presettable but constant throughout the scan.
Coverage
Holes are often visible in a Digital Elevation Model (DHM), such as the AHN, recorded from an airplane or helicopter. They are due to the wavelength of the laser scanner. Two wavelengths are used: (1) the green part of the visible light and (2) the near-infrared (NIR) part of the electromagnetic (EM) spectrum. NIR is invisible to the human eye. When a laser beam collides with an object, there are three types of interactions: the energy can be (partially) reflected, absorbed or transmitted. The degree of reflection, absorption and transmittance depends on wavelength and object characteristics. NIR, which is mainly used for projects on land, is absorbed by water. Due to the absence of reflections, ponds, lakes and other bodies of water form areas without data in a DHM, which are visible as holes. Water allows green light to pass through, which is why green laser is used to fabricate DHMs of sea and river bottoms. Laser beams also pass through glass making windows like black holes in walls and cars in laser point clouds recorded from the ground.
Beam divergence
The term point in point cloud suggests that they would be points in the mathematical sense. This is an understandable mistake. However, upon leaving the sensor, the cross section of a laser beam is already circular. Air particles further enlarge the cross section - the farther away from the sensor the wider the laser beam. The cross-sectional footprint on a surface is often many decimeters depending on the distance, potentially resulting in smearing depending on the object properties. As a result, the moment the reflection enters the sensor cannot be precisely determined, causing errors to creep into the distance measurement. Smearing occurs, among other things, due to misalignment of a surface in relation to the laser beam and micro-relief. When skewed, for example, a wall is not perpendicular to the laser beam. The part of the wall closest to the sensor reflects the beam earlier than other parts, resulting in smearing. Micro-relief is the degree of height or depth differences within the footprint. These also cause smearing. A particular form of micro-relief is when a shrub is in front of a wall. The depth differences are caused by two different objects. Either the shrub or the wall is assigned an incorrect distance. In the case of large smearing, no distance can be measured.
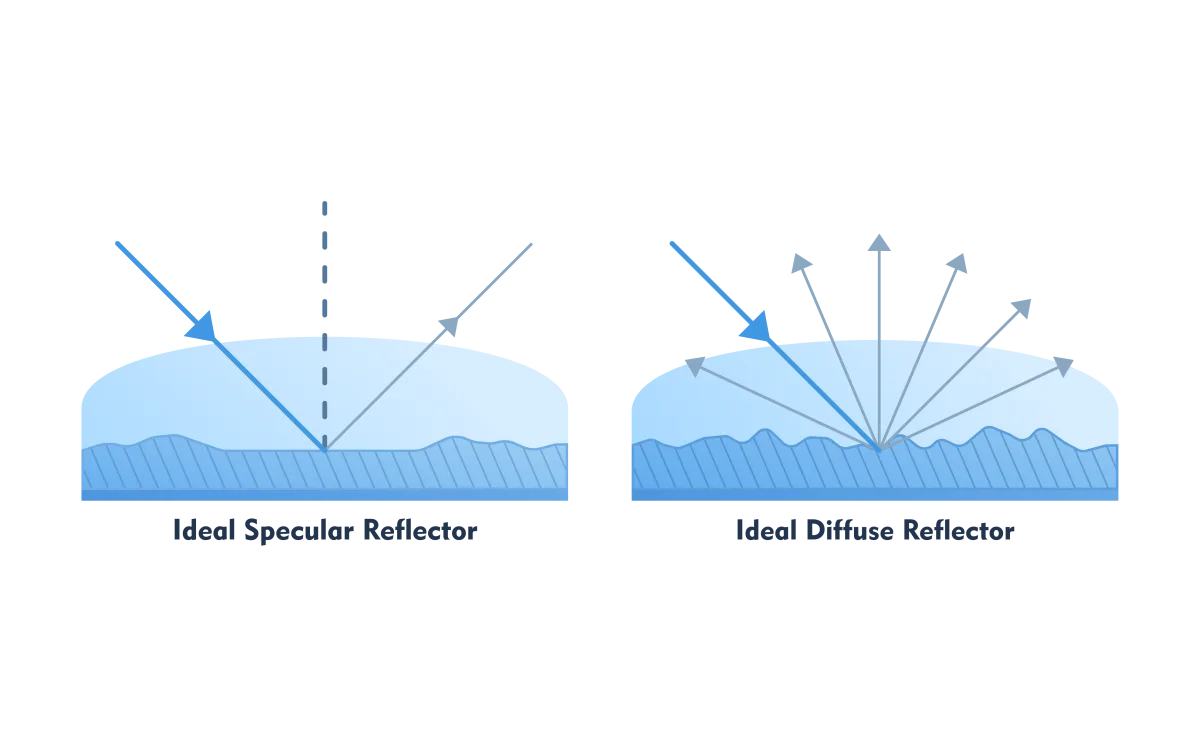
Figure 2 - When a surface behaves like a mirror (ideal specular reflector) the laser scanner receives no reflection.
Multiple reflection
Multiple reflection, also known as multipath, also causes an incorrect distance. Multipath reflection occurs when a surface does not behave as a diffuse reflector but as a mirror (specular reflector) (Figure 2). In a diffuse reflector, part of the laser beam reflects in the direction of the laser scanner. This is what we want because only then can the distance be measured. With a specular reflector, the reflection disappears in the other direction - nothing is measured. But the reflection, and this is an error source, can reflect for a second time on a nearby surface. When this reflection is captured by the laser scanner, a longer distance traveled is measured. When recorded from the air, the excessively long distances are visible as a dip in the DHM (Figure 3). These are usually isolated points that can be removed automatically with filtering techniques.
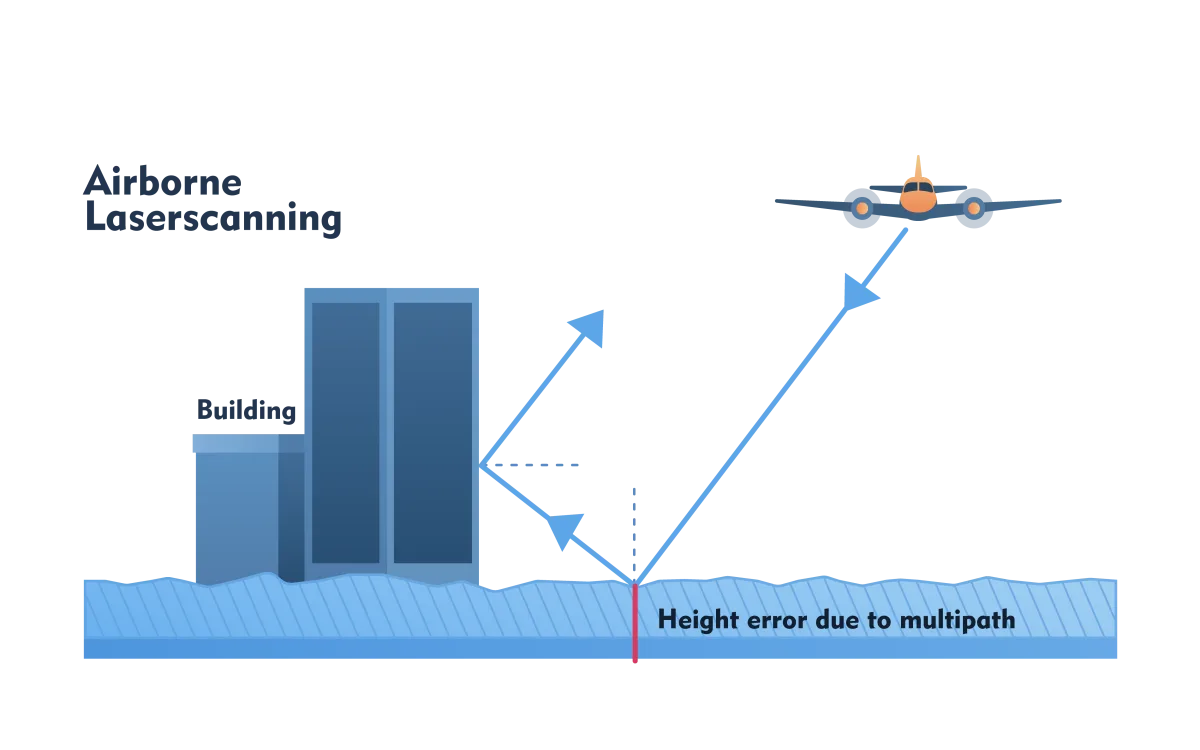
Figure 3 - Multiple reflections increase distance which is visible in a DHM as a point lower than the surrounding points.
Unwanted objects
Laser scanning is a non-selective measurement technique. Objects such as cars, cows, bicycles and pedestrians also end up in the point cloud. Furthermore, for many projects one wants a DHM that represents ground level and thus is free of buildings and vegetation. These must be removed from the point cloud for which automated filtering techniques have been developed. These do not work perfectly. It is still necessary to perform a visual check to remove unfiltered points and to put back ground level points that have been erroneously removed. This is a labor-intensive and therefore expensive exercise.
Artifacts and Occlusion
Unlike photographs, in laser scanning the scene is recorded point by point. Basically, the laser beams are emitted and recorded one after another, although in current systems multiple laser beams are often emitted simultaneously, for example 32, 64 or 128 simultaneous beams (multi-beam). The scanning mechanism may cause artifacts if, for example, pedestrians or cyclists walk right through the scene during a TLS scan. They may not be recognized as people but as vertical stripes. Artifacts and unwanted objects as well as objects important to the project can cause occlusion. Occlusion means that part of an object is not visible from the sensor position due to the presence of another object in the line of sight. It results in no data being acquired from (parts of) objects that are important to the project. Occlusion should therefore be avoided as much as possible by a sophisticated recording strategy.


