Laser scanning has become a widely used measurement technique for projects requiring three-dimensional (3D) models of objects. The basis of 3D models are point clouds consisting of a collection of X,Y,Z coordinates.
Laser scanners, which produce such point clouds, are mounted on platforms that can be classified into (1) ground-based, such as tripods, cars, trolleys and backpacks, and (2) airborne platforms, such as aircraft and drones. Laser scanning technology is often referred to as Lidar (Light Detection and Ranging). This is to show its similarity to the much older Radar (Radio Detection and Ranging). The measurement technology is still evolving. The number of applications is increasing daily, as is the number of professionals who value laser point clouds as an accurate and reliable source of information for their projects.
Laser scanner
A laser creates a narrow beam of light of the same wavelength and high energy. This allows laser beams to effortlessly cover distances of many kilometers through the atmosphere. The downside of this favorable property is that the beams can damage skin and eyes. Laser scanners must therefore comply with strict safety regulations.
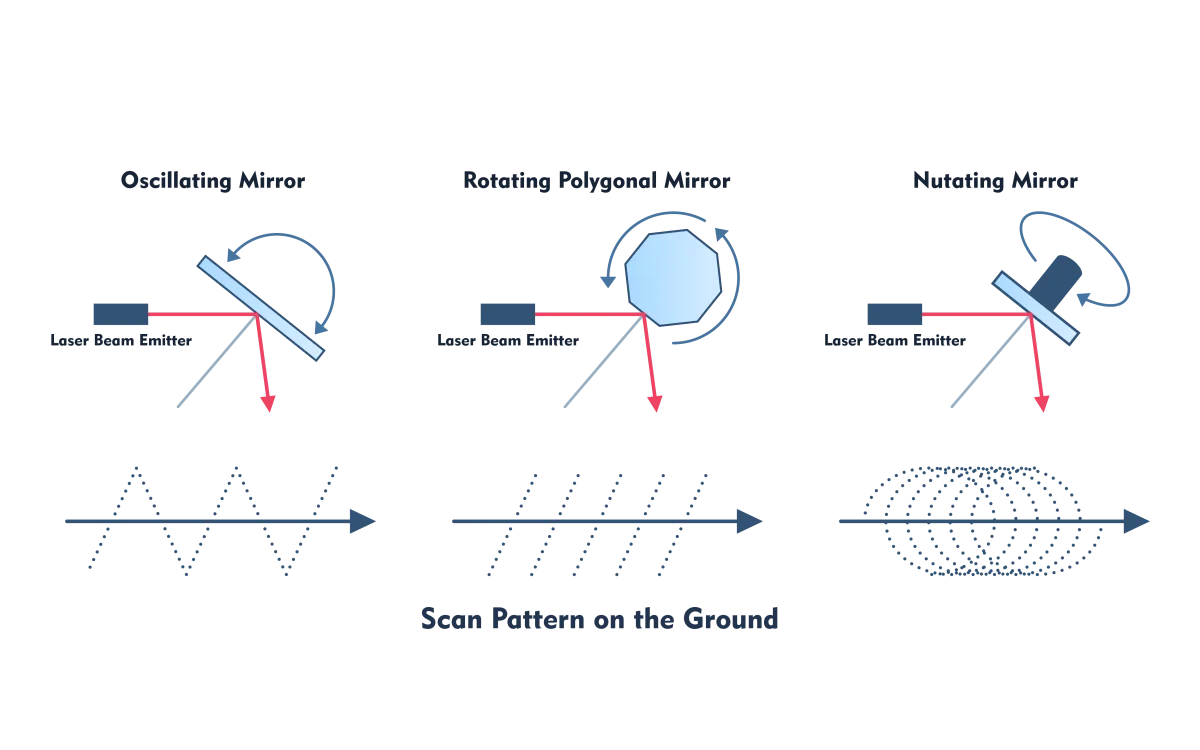
Figure 5 - The type of mirror for spreading the laser beams across the object space determines the scanning pattern.
The essential components of a laser scanner are the sensor that emits laser beams and the sensor that records the reflection on the surface first hit. The registration consists of (1) distance from the object and (2) intensity of the returned signal. The laser beams are scattered across the object space by an oscillating, rotating or nutating mirror, which rotates at a constant speed (Figure 1). The type of mirror determines the scanning pattern. Sometimes electronic components, which do not contain moving parts, are also used. To get a regular distribution of points across a grid, interpolation is applied afterwards. The number of laser beams emitted per second runs up to one million in advanced scanners. To convert the distance to X,Y,Z coordinates in a chosen coordinate system, other components must be measured in addition to the distance. Which components these are depends on the type of platform and whether indoor or outdoor measurements are taken. Photographs are often taken simultaneously with measuring cameras (Figure 2). This allows each point to be assigned a color. This facilitates further processing depending on the type of project.
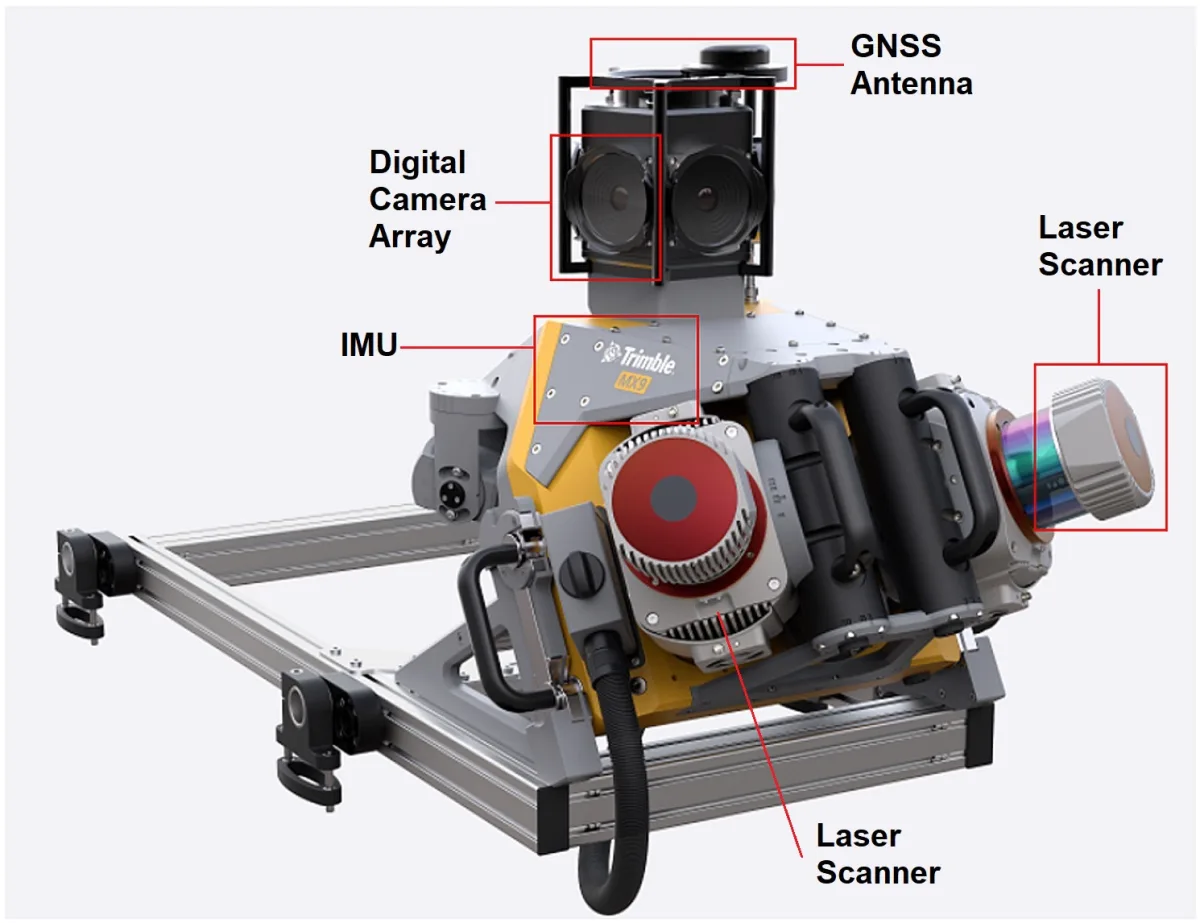
Figure 2 - The components of a mobile system are securely mounted on a rack for recording with a car; the system shown is the Trimble MX-9.
Measuring Distances
Laser scanners can measure distances in several ways. The two most common principles are:
- Phase shift (Phase-shift): laser beams are amplitude modulated; signals of different wavelengths are superimposed on a carrier wave
- Pulse measurement, also called time-of-flight (ToF): pulses are emitted and their duration back and forth from the object is measured; the distance is calculated by multiplying the duration by the speed of light and dividing the result by two
Both principles are used in laser scanners mounted on ground platforms, such as cars and tripods. The accuracy of ToF scanners is a few centimeters while the accuracy of phase-shift scanners is a few millimeters. These scanners produce higher point densities compared to ToF scanners, but in turn, ToF scanners can cover greater distances. That is why they are used in aircraft, helicopters and drones.
From Distances to X,Y,Z coordinates
To convert distances to X,Y,Z coordinates, the position and orientation of the laser scanner in object space must be known in the chosen coordinate system as well as the angle at which the laser beam leaves the sensor (scanning angle). This angle is determined by the position of the rotating mirror placed in front of the sensor. In outdoor space, the three coordinates of the position are determined with a GNSS receiver placed next to the laser scanner. The three angles of position are determined with a gyroscope that together with accelerometers form the IMU (inertial measurement unit). GNSS and IMU make it possible to accurately determine the 3D position coordinates and position of the laser scanner in space. Figure 3 outlines the measurement components of laser scanning from an aircraft. To convert the individual X,Y,Z coordinates to a uniform coordinate system, the various scans must be geometrically coupled together. To convert the coordinates to the chosen coordinate system - georeferencing - pass points are required. These are points in object space whose measurement experts have measured the coordinates with accurate surveying equipment. The chosen coordinate system will often be the national (RD) system.
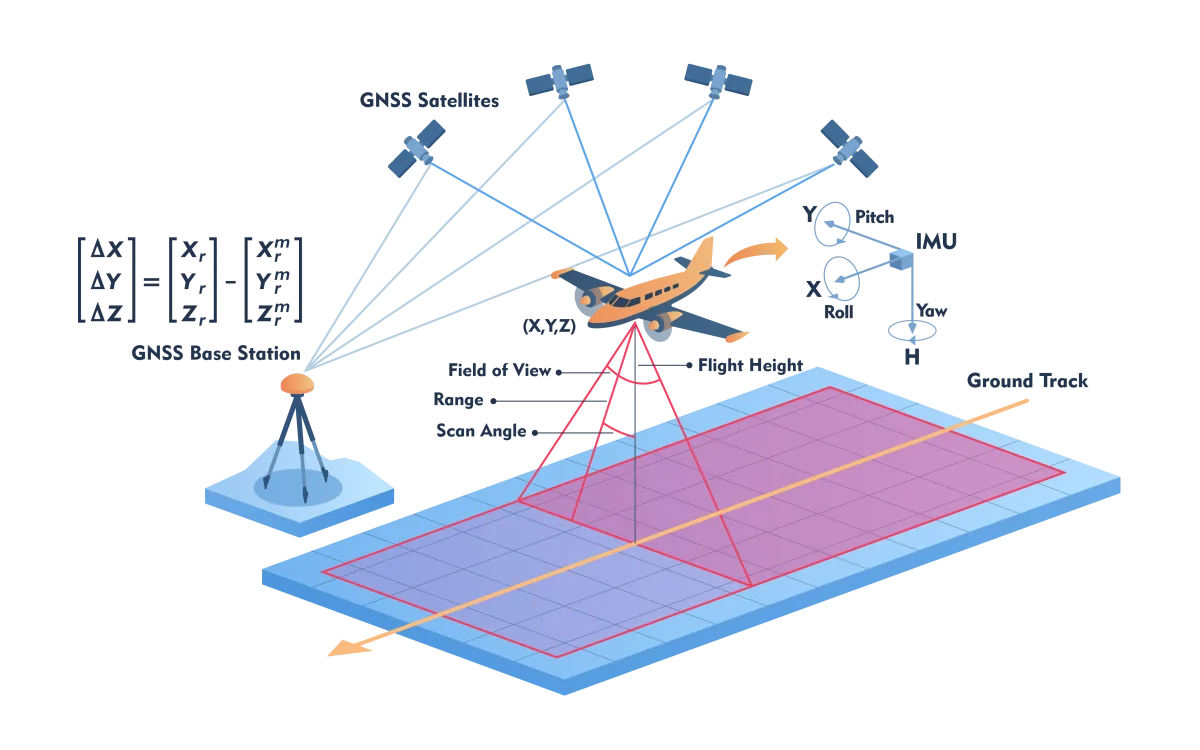
Figure 11 - Measurement components in a laser scanning flight to calculate the X,Y,Z coordinates of that point from the distance to a point.
Indoor scanning
When scans are made in an indoor space, GNSS is not useful because walls block GNSS signals. Positioning developed in robotics brings a solution. To guide a robot autonomously and safely through an unfamiliar space, it must determine its position and at the same time create a point cloud of its immediate surroundings to avoid collisions. To this end, an advanced, computationally intensive technique has been developed to simultaneously (simultaneously) determine position and create a point cloud of the environment - called simultaneous localization and mapping (SLAM). The main measurement sensors to determine position and attitude using the SLAM method are IMU, odometers, laser scanners and digital cameras.
Quality
When hundreds of millions or billions of points are needed to obtain an accurate and detailed 3D point cloud, it is necessary to make a thorough recording plan in advance. Once the coordinates are calculated in the chosen coordinate system, another important and indispensable step needs to be taken: quality assurance. Here, experts assess whether the point cloud meets predetermined specifications, such as the accuracy of object coordinates and point density. They also remove points to which incorrect coordinates have been assigned due to double reflection of the laser beam and other disturbances. The quality aspects of laser scanning are discussed in a separate article.