
Cameras and laser scanners can be mounted on many types of platforms. Nowadays, drones - called Unmanned Airborne Systems (UAS) by professionals - are also wildly popular because of their great flexibility and usability for many kinds of projects.
A drone is remotely piloted or flies (semi-)autonomously according to a pre-programmed flight plan (Figure 1). In autonomous flights, everything happens automatically: takeoff, flight, data collection and landing. A ground pilot remains necessary to intervene, for example if the drone threatens to collide with an unforeseen obstacle. Sensor data - photographs, laser scans, GNSS positions and IMU data - are transmitted wirelessly to a ground station computer, which is the pilot's open-air cockpit.

Figure 1 - Flight plan of an autonomous, photogrammetric flight showing the flight path and the points (waypoints) where pictures are to be taken.
Drones
Drones are mostly electrically powered and can carry a load heavier than their own weight. A full battery lasts less than one hour. Lightweight drones are used in most projects, for cost reasons and because of government regulations. European rules have applied since 2021.
Drones come in three types: aircraft (fixed-wings), (heli)copters and hybrid platforms. The elevator capability of an aircraft's wings allows for higher speeds and requires less energy from the rotors than is the case with a copter. This allows an aircraft to stay in the air longer, operate in stronger winds and cover larger areas in a single flight. In the absence of a runway, an aircraft can be lifted into the air with a catapult or hand throw and land with a parachute. Copters are more maneuverable, can hang still in the air and take off and land vertically. To combine the advantages of airplanes and copters, hybrid platforms have been developed. These are aircraft whose rotors can turn their forward position to vertical allowing them to take off and land like a copter. In flight, they are aircraft.
Cameras
The payload capacity of drones is too small for bulky metric cameras. Therefore, non-metric (consumer) cameras are used together with small GNSS receivers and IMUs. The image quality of the cameras is excellent but the camera parameters - camera constant (c) and the two main point coordinates (x0,y0) (see also: Measuring in Photos) - are unstable and change during flight. They have a different value for each photo. Software has been developed to calculate the camera parameters of each separate photo taken during drone flight. This so-called self-calibration is possible when the photos have at least a longitudinal overlap of 80% and a transverse overlap of 60% (Figure 2). Many more photos are thus required than with metric cameras. The initial values of the camera parameters are determined by pre-calibration.
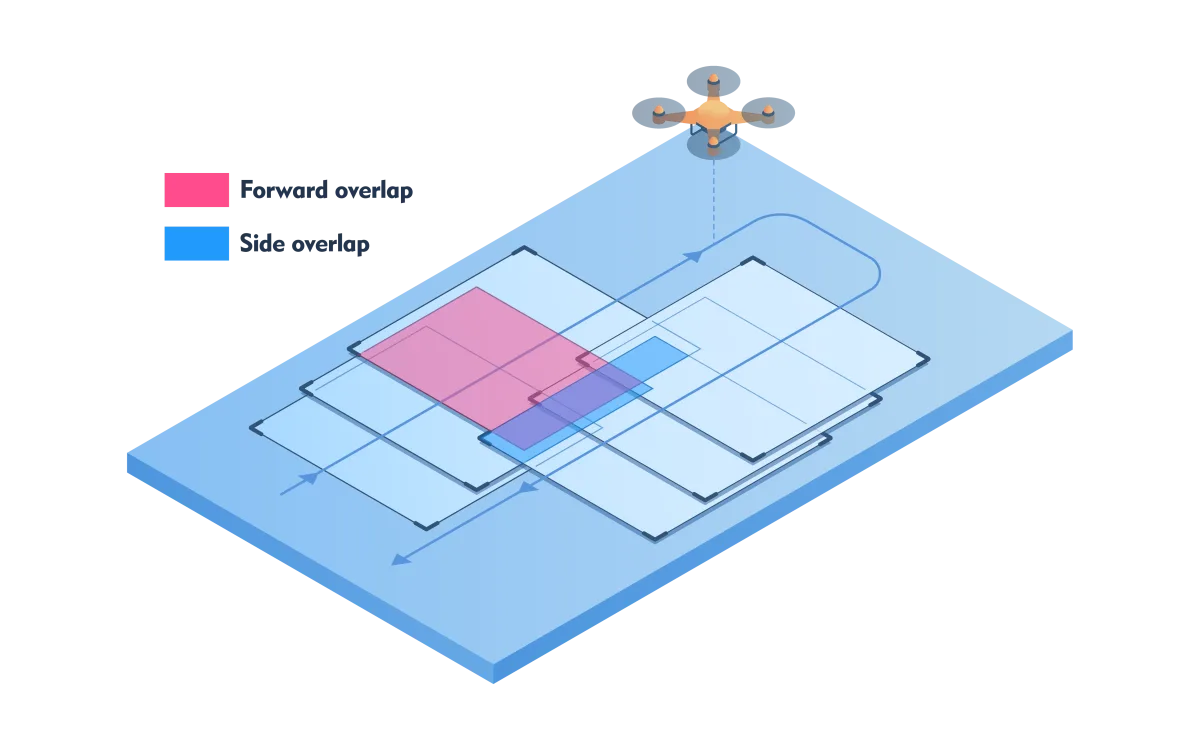
Figure 2 - An aircraft or copter records an area in strips where the pictures overlap.
Laser scanners
The laser scanners, used in manned flights, weigh several tens of kilograms and use a lot of power. Due to increasing demand for laser point clouds for small-scale projects, rigorous miniaturization took place starting in 2014. Manned laser flights typically operate at altitudes between one and six kilometers. For drones, the flight altitude is between 40 m and 400 m. Lightweight laser scanners are not developed specifically for drones but also for use on cars, trolleys, backpacks and handhelds. Their field of view (FOV) is therefore large, sometimes as much as 360 degrees all around. This does not mean that an area can be recorded in one flight. As in photogrammetry, strips must be recorded with cross overlap. There are two reasons for this: 1) a laser pulse can only travel a limited distance before it dies out and 2) the farther away from the flight path the fewer points per m2 are recorded. This is because the point density - a key quality characteristic - gradually decreases toward the ends of the strip due to the constant scanning angle. Transverse overlap is necessary to link the strips together and to avoid gaps caused by drone slews. To obtain a high point density, an area is sometimes recorded twice, with the strips of the second flight being perpendicular to those of the first. Unlike photogrammetric recording, the position of the recording platform cannot be calculated from the data afterwards. Very good GNSS and IMU sensors are therefore necessary on board the drone. These add weight, energy consumption to the platform and often involve high costs.
The maximum distance of a pulse is related to the energy of the pulse. The more energy, the greater the distance but the fewer pulses per second. When flying at an altitude of 50 m instead of 350 m, the pulse frequency can be increased tenfold because at lower flight altitudes the pulses require less energy. The pulse frequency is often adjustable. When setting up the flight plan, it is a matter of finding a good balance between flight altitude, pulse frequency, point density and bypassing obstacles. Currently, laser scanners are less than half a kilogram (Figure 3), allowing laser scanner and camera to be mounted side by side. This greatly increases deployability.

Figure 3 - Miniaturization of laser scanners has enabled the development of laser drone flights. Above: examples of lightweight laser scanners (left: Velodyne Lidar Puck VLP-16, right: RIEGL VUX-1). Below: YellowScan Mapper during a drone flight.


